Raspberry Pi Pico MicroPython ile Servo Motor Kontrolü
22-07-2022
15:14
Servo motorlar; çıkış, mekaniksel konumlar, hız veya ivme gibi parametrelerin de kontrol edildiği ve hareket kontrolü yapılan bir çeşit düzenektir. Servo motorun miline bağlı olan bir enkoder vardır. Bu enkoder servo motorun dönüş yönü, hızı ile dönüş açısını sürekli kontrol edebilmek için servo sürücüsüne sinyal göndermektedir. Ardından, sürücüye gelen sinyallere göre de; servo motora komut verir. Geri besleme sinyali ile de kontrol edilir.
Bu uygulamamızda servo motorun PWM ile çalışmasını inceleyeceğiz. Kullanacağımız malzemeler:
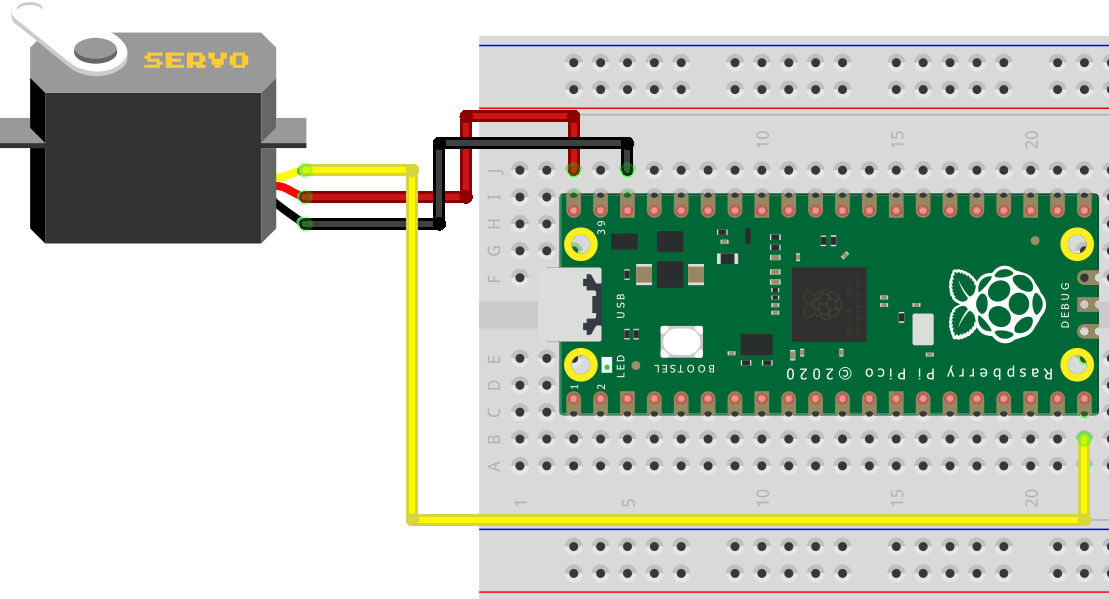
Devre şekildeki gibi kurulmaktadır.
Artık kodlama kısmına geçebiliriz. PWM’in periyodu 20ms(50Hz)dir. Bu yüzden frekansımızı 50 Hz olarak belirtiyoruz.
PWM’in görev döngüsü 65535 idi. Ancak servo motorun görev döngüsü 1000 ve 9000 arasındadır.
Motorun derecesine göre görev döngüsü değişkenlik gösterecektir. Bu yüzden bir formül tanımlıyoruz.